Sign In
Account
Cart
首页
公司介绍
产品信息
运用展示
技术交流
人才招聘
联系我们
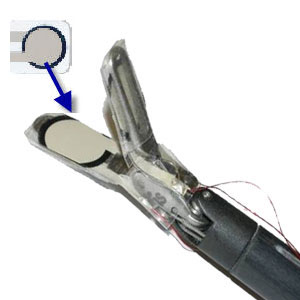
抓力、夹力测量
描述:
随着最近机器人在工业和医疗微创手术上的运用不断扩展,为机器人提供正确、灵敏的触力(抓力、夹力)反馈是在各种复杂运用中至关重要的因素。传统的称重传感器由于比较大而笨重并且昂贵,越来越多的产品设计都倾向运用轻巧便宜易于安装(不需破坏测量物体的结构)的Flexiforce传感器来解决他们遇到的抓力测量问题。
产品列表
薄膜压力传感器
薄膜压力测试系统
压力分布测试系统
标定设备
薄膜传感器、仪器设备定制
油压压力采集系统
温度采集系统